机器人操纵的触觉感知技术综述

打开文本图片集
本文引用格式:,,,等.机器人操纵的触觉感知技术综述[J].自动化与信息工程,2025,46(5):1-15.HU Jun LI Zhongxuan, QI Jiaming, et al. A review of tactile perception technologies for robotic manipulation[J].Automation& Information Engineering,2025,46(5):1-15.
关键词:机器人操纵;触觉感知;触觉传感器;多模态控制;机器人抓取中图分类号:TP242.6 文献标志码:A 文章编号:1674-2605(2025)05-0001-15DOI: 10.12475/aie.20250501 开放获取
A Review of Tactile Perception Technologies for Robotic Manipulation
HU Jun1 LI Zhongxuan² QI Jiaming³ WU Hongmin4ZHOU Peng1 (1.School of Advanced Engineering, Great Bay University, Dongguan 5230oo, China 2.Department of Computer Science, University of Hong Kong, Hong Kong 999077, China3.Collge ofMechanical andElectrical Engineering,Northeast Forestry University,Harbin 15oooo,China4.Institute of Inteligent Manufacturing, Guangdong Academy of Sciences, Guangzhou 510o70, China)
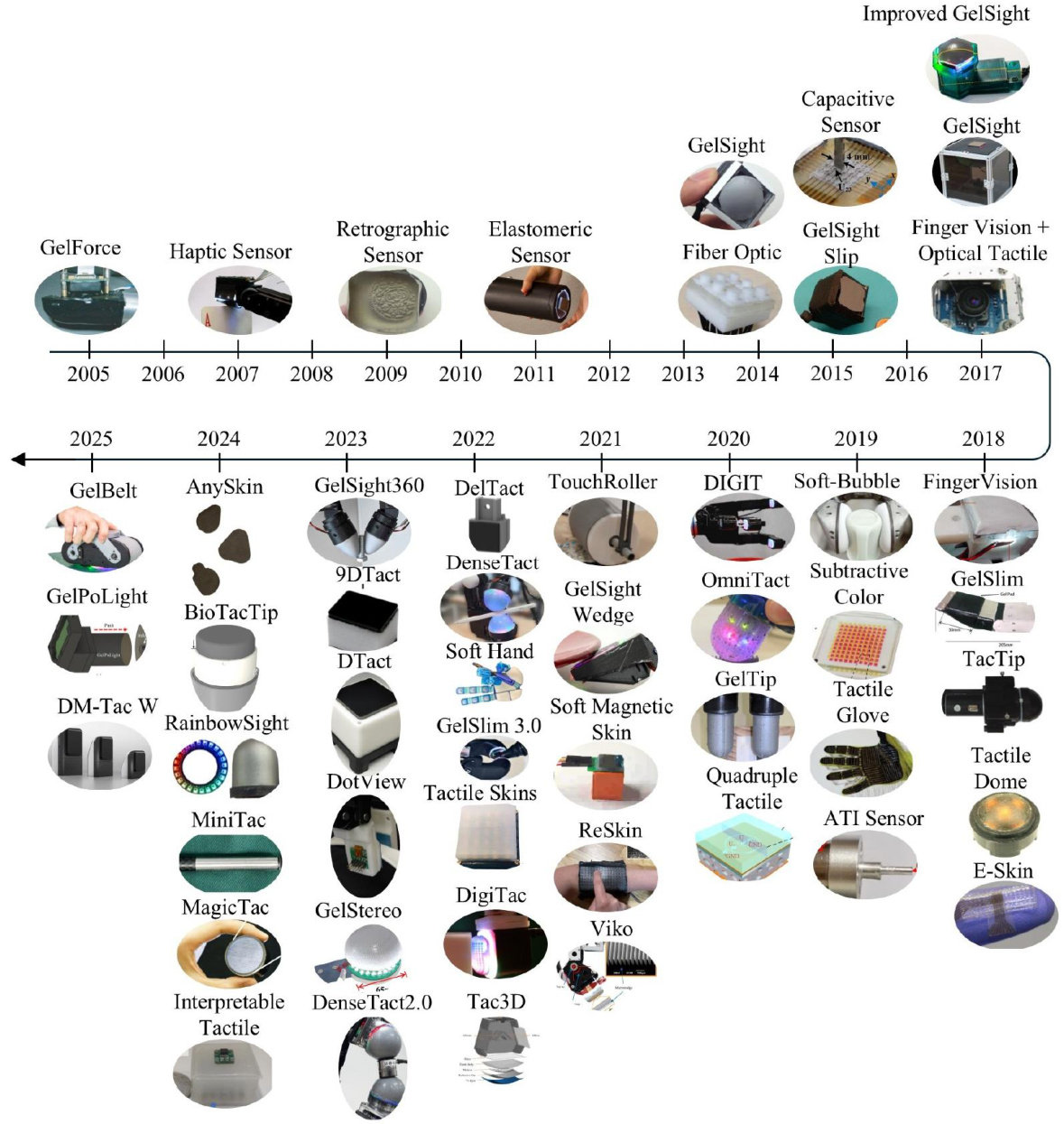
Abstract:Tactilesensing isakeytechnology forrobots toachieve dexterous manipulationand human-robot interaction.This articleevietctdaetsictilssfobticulatirdestgpilsactes applicatioealsotactilodasusaiodlatioosortste oncommonlyusedsimulationplatformsanddatasetsfortactileperception.Theappcationof tactilepereptiontechnologyntypical manipulationasschasgabltitroltacteteiotetiodeoi summarized.Finallthedevelopment rendsoftactileperception technologyithefieldofroboticmanipulationarediscussed.
keywords: robotic manipulation; tactile sensing; tactile sensors; multiple model control; robot gripping
0 引言
随着人工智能、传感器与智能控制技术的发展,机器人在工业制造、医疗服务、家庭协作等领域的应用日益广泛[l-5],其任务场景逐步从传统的重复性操纵拓展至更复杂的非结构化环境操纵。(剩余33906字)
