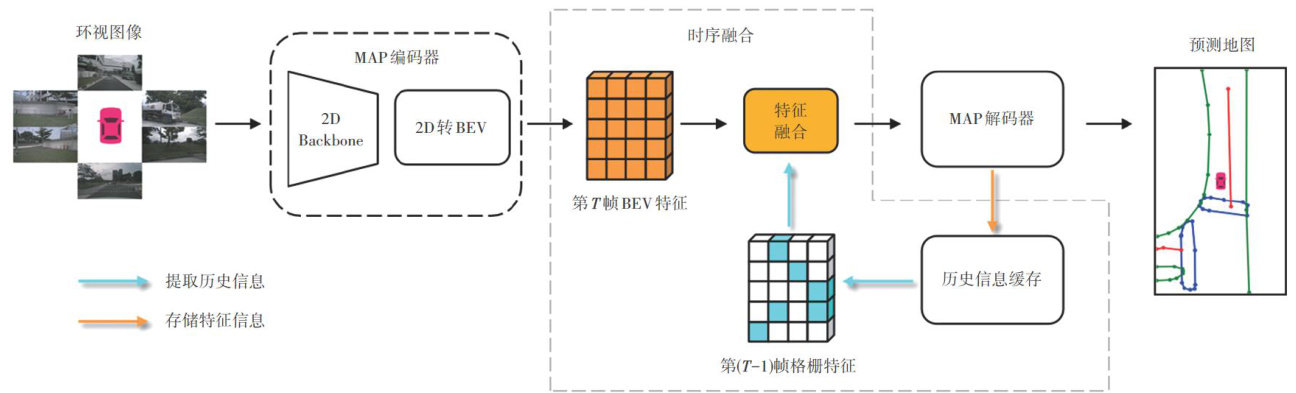
基于时序信息融合的轻量高精地图在线构建方法

打开文本图片集
主题词:在线建图 轻量高精地图 自动驾驶 时序融合 鸟瞰图
中图分类号:U461 文献标志码:A DOI:10.19620/j.cnki.1000-3703.20240889
1前言
高精地图是各类自动驾驶任务的基础,传统高精地图通过基于同步定位与地图构建(SimultaneousLocalizationAndMapping,SLAM)[2-3]的方法离线构建,存在构建工序复杂、维护成本高、更新速度慢等问题,不能完全满足自动驾驶的实时导航要求。(剩余12552字)