自动泊车场景下障碍物感知融合的实时性改进

打开文本图片集
中图分类号:U463.6 文献标识码:A 文章编号:1003-8639(2026)03-0070-0
Real-time Improvement of Obstacle Perception Fusion in Autonomous Parking Scenarios
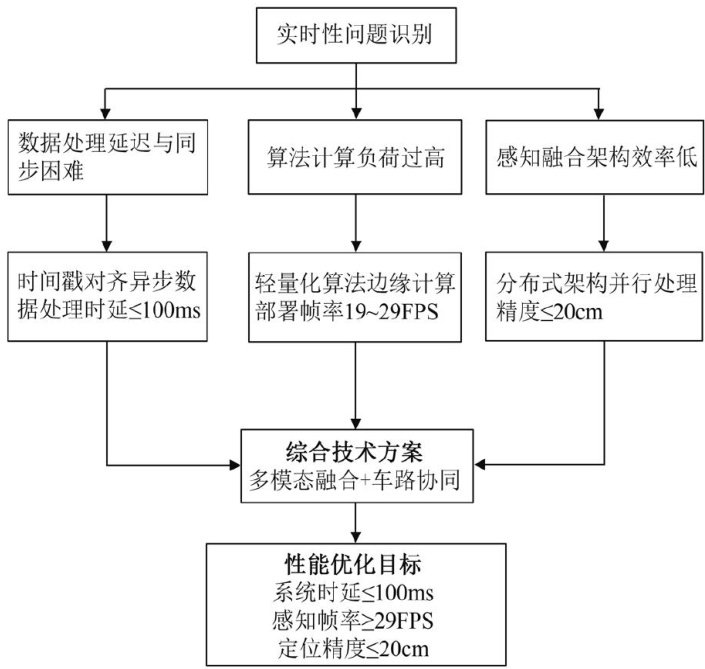
【Abstract】The real-time performance of obstacle perception and fusion forms the foundation for the safety and reliability of automatic parking systems. Existing multi-sensor systems suffer from acumulated processing delays, excesivealgorithmicload,andinefficientarchitectures,leading todelayedresponsesanderoneousdecisions.This paper addresses challenges including multi-sensor time synchronization diffculties,constrained computing resources in complex environments,and ineffciencies in traditional fusion architectures.Proposed improvements encompass timestamp alignmentoptimization,asynchronous procesing enhancements,lightweightalgorithms withedgecomputing deployment, and distributed architecture design with paralel processing. These measures achieve system latency below 100ms,a perception frame rateof 29FPS,and positioning accuracy within 2Ocm,significantly improving both systemperformance and user experience.
【Key words】 automatic parking obstacle perception; multi-sensor fusion; real-time performance improvement edge computing
0 引言
随着汽车产业向智能化、网联化方向快速发展,自动泊车技术已成为智能化领域的重要发展方向。(剩余3984字)